|
Pilot Study
Automatic Measurement of Human-Robot Interaction We conducted a pilot study at the Intelligent Robotics and Communication laboratories at ATR, Japan, to evaluate the expression recognition system in unconstrained environments. Subjects interacted in an unconstrained manner with RoboVie, a communication robot developed at ATR and the University of Osaka (Ishiguro, 2001).
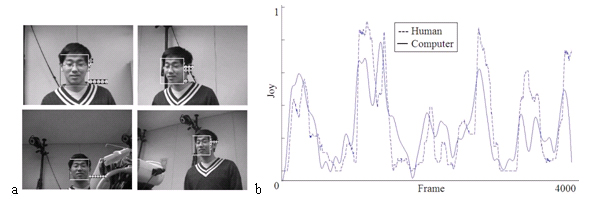
To improve performance of the system we simultaneously recorded video from 4 video cameras. 14 paid participants recruited from the university of Osaka were invited to interact with RoboVie for a 5 minute period. Faces were automatically detected and facial expressions classified independently on the four cameras. This resulted in a 28 dimensional vector per video frame (7 emotion scores x 4 cameras), The output of the 4 cameras was then combined using a standard probabilistic fusion model. To assess the validity of the system, four naive human observers were presented with the videos of each subject at 1/3 speed. The observers indicated the amount of happiness shown by the subject in each video frame by turning a dial, a technique commonly used in marketing research. Figure 3 compares human judgments with the automated system. The frame-by frame correlation of the human judges averaged across subjects and judge pairs was 0.54, The average correlation between the 4 judges and the automated system was 0.56, which does not differ significantly from the human/human agreement (t(13) = 0.15, p<0.875). Figure 3b shows frame by frame the average scores given by the 4 human judges for a particular subject, and the scores predicted by the automatic system. We are presently evaluating the 4 camera version of the system as a potential new tool for research in behavioral and clinical studies.
|
||||||||||||||||||||||||||||||